撮影用 自作 電動スライダー 製作解説
どうも、Nimbusです。
今回の記事は、前回の記事「撮影用 電動スライダーを自作した」で紹介した自作の撮影用電動スライダーの製作解説を行います。
製作の実作業は基本工作ばかりなので、制作に使った部品の紹介が中心となります。
自作した電動スライダーを紹介する動画をYoutubeに投稿しています。
使用した部品の一覧
上のYoutube動画や、動画の概要欄で紹介されているWebサイトを参考に、駆動部分は3Dプリンター用の部品を使っています。
実店舗での購入が難しい物が多いので、大部分はネット通販で購入しました。
2040 V-スロット アルミ レール 400mm
アルミレール用M5ナット
ガントリーロッドプレート Vスロット用滑車
TMC2208 ステッピングモータードライバー
NEMA17 HS440 ステッピングモーター
NEMA17 59Ncm 2A ステッピングモーター
GT2 タイミングベルトギアセット
GT2テンショナー
GT2タイミングベルトクリップ
NEMA17モーター用マウントプレート
PWM信号発生器
14.5 x 17mmアルミノブ
ブレッドボードユニバーサル基板
2×8cmユニバーサル基板
2.54mmのピンヘッダーソケット
2.54mmヘッダーピン
0.2sq 配線 黒 赤
ロッカースイッチ 20mm穴用 3位置
ロッカースイッチ 20mm穴用
ロッカースイッチ 15mm穴用
JST XHコネクターセット
平型端子セット
TW型汎用プラスチックケース TW9-6-17
アルカスイス互角クランプ
アルカスイス互換プレート
5.5mm 2.1mm DCソケット
ステンレスビスセット(M3、M4、M5 六角 トラス)
USBタイプAプラグ基板
ステップダウンコンバーターモジュール (セリアで買ったシガーソケットUSBアダプターで代用)
コンデンサーセット
4cmファン
ACアダプター DC12V 3A
M5 x 8mm 六角穴付止めネジ
収縮チューブ2.0黒 2m
WAKI 粘着ソフトクッション 20mm丸X高さ2mm 8個入 CN-102
2チャンネルリレーモジュール
スライド部分の製作
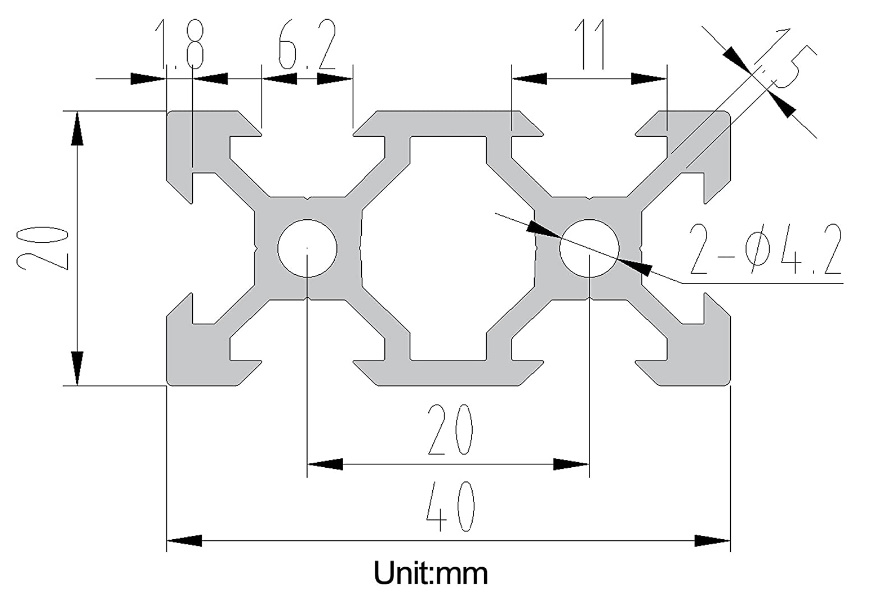
20X40mmのアルミレールを使いました。
同じ寸法のアルミレールは色々なメーカーから多種多様な製品が売られていますが、3Dプリンター用の部品が使えるのはVスロットと呼ばれる規格の物となります。
断面形状は上の画像の通りとなります。

アルミレールは規格や製品によって溝の断面形状が異なります。
左はミスミで購入したアルミレール。右はアマゾンで購入したVスロットのアルミレールに ガントリーロッドプレートを取り付けた様子です。
3Dプリンター用のガントリーロッドプレートはVスロットのアルミレールでしか使えません。
ガントリーロッドプレートも色々種類があって、今回使った物は厚みが6mmで穴がM5のネジ穴となっています。他にも、厚みが3mmで単なる穴になっている物など色々あります。

アルミレールはレール幅にも種類がある様ですが、6mm幅が一般的みたいで、ナット類は互換性がある様でミスミで購入したM5用のナットはVスロットのレールでも問題無く使えています。
ナットを新規に購入するならアマゾンで売られているTスロット用が良いでしょう。


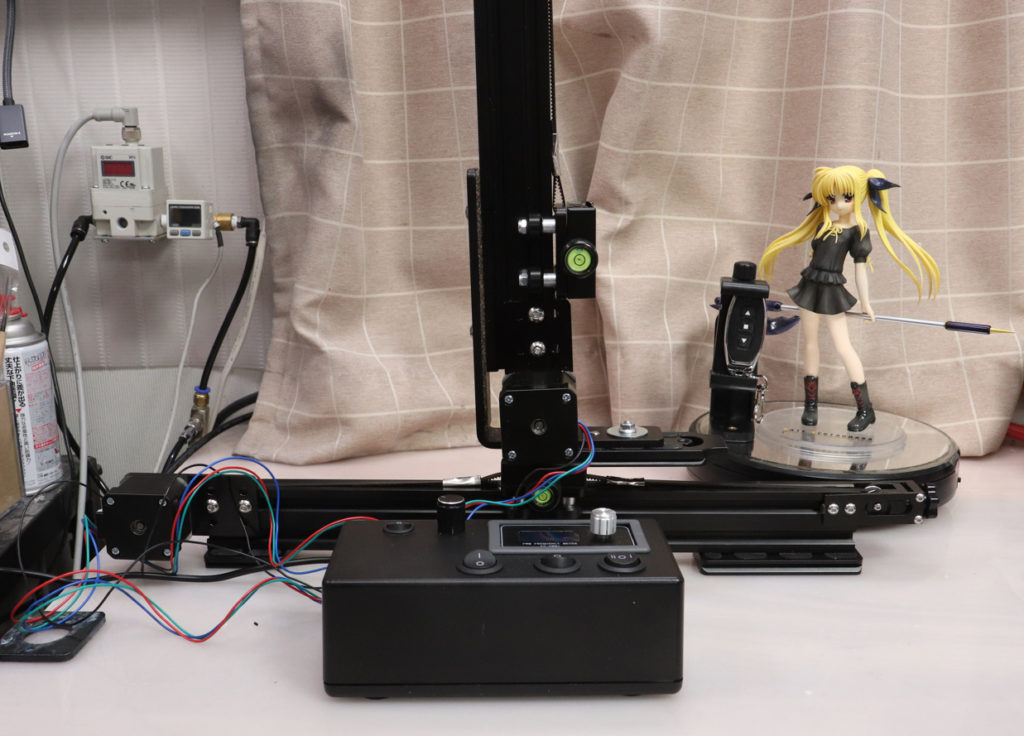
ガントリーロッドプレートのネジ穴を使ってアルカスイス互角クランプをホームセンターで購入したM5x10mm 皿ネジで固定しています。
写真上の垂直移動用スライダーのアルカスイス互角クランプはカメラとレンズの自重で縦方向に回転しない様に、4.2mmのドリルで穴開けして、タップでM5のネジ穴を開け、M5 x 8mm 六角穴付止めネジ(M5 x 5mmでも良いと思う)でガントリーロッドプレートと2点止めしています。
アルミ製のクランプに穴開けするのは大変だったのと、横移動用は回転する可能性が低いので、横移動用のクランプには穴開け加工は行いませんでした。
横移動用の手動のスライダーなら、アルミレールとガントリーロッドプレート、アルミレール用ナット、ビス類、アルカスイス互角クランプやプレートを使い、ドライバーのねじ止めだけで作れます。
垂直移動用のカメラの回転防止に今回と同じ加工を行うのであれば、4.2mmのドリルと、電動ドリル、M5タップ、タップハンドル等が必要ですが、試作時にはM5ネジをしっかり締めるだけでも縦回転を防ぐ事はできていたので、M5ネジをネジロックでしっかり締めたり、アルカスイス互角のクランプとガントリーロッドプレートとを接着してしまうのも良いかも知れません。
モーター駆動部分

電動化の動力にはNEMA17規格のステッピングモーターを使いました。
NEMAとはアメリカの電気製品の規格だそうで、モーターだとサイズが大きくなるほど数字が大きくなる様です。
3DプリンターにはNEMA17が一般的で、NEMA17よりも大きくて強力なNEMA23モーターも使われる事がある様です。

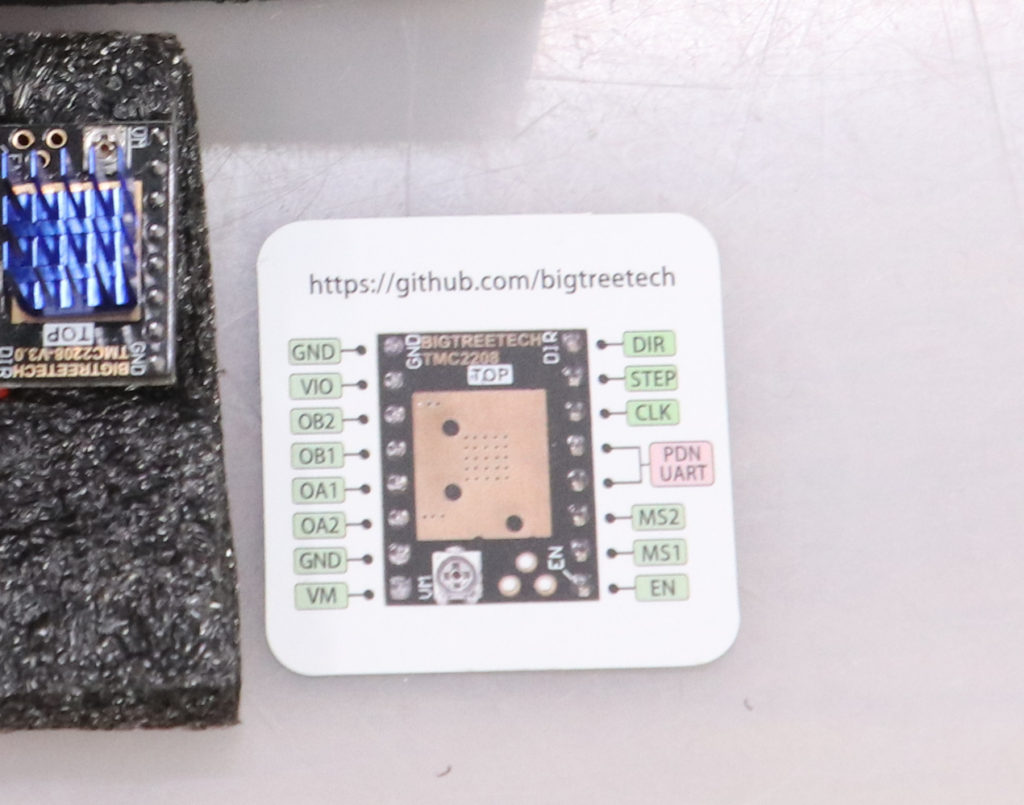
ステッピングモーターを駆動させるのにはステッピングモータードライバーと呼ばれる、制御用の回路が必要となります。
ステッピングモータードライバーには性能によって種類が色々あり、購入時は違いが良く分からなかったのて、参考にしたWebサイトの記述に従ってTMC2208を使いました。
今から新造するならTMC2209を使った方が良いとは思います。TMC2209はTMC2208の高性能版でピン配列や使い方は同じです。

電源は以前別の用途で購入たDC12V 3AのACアダプターを使いました。
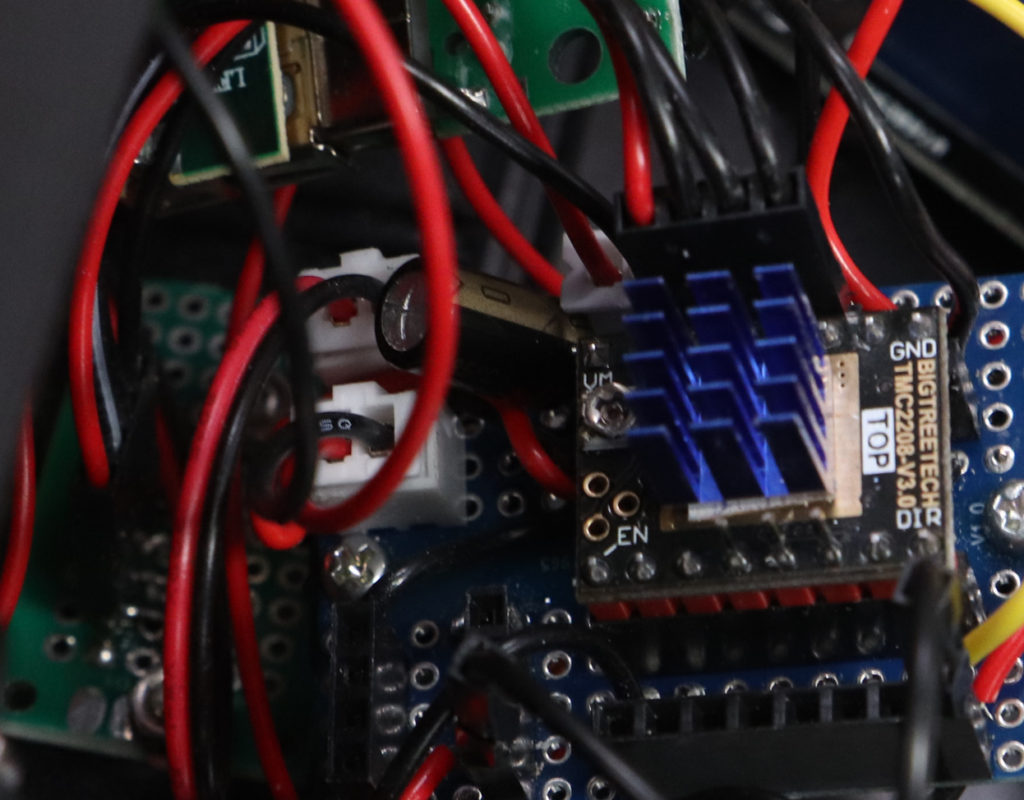
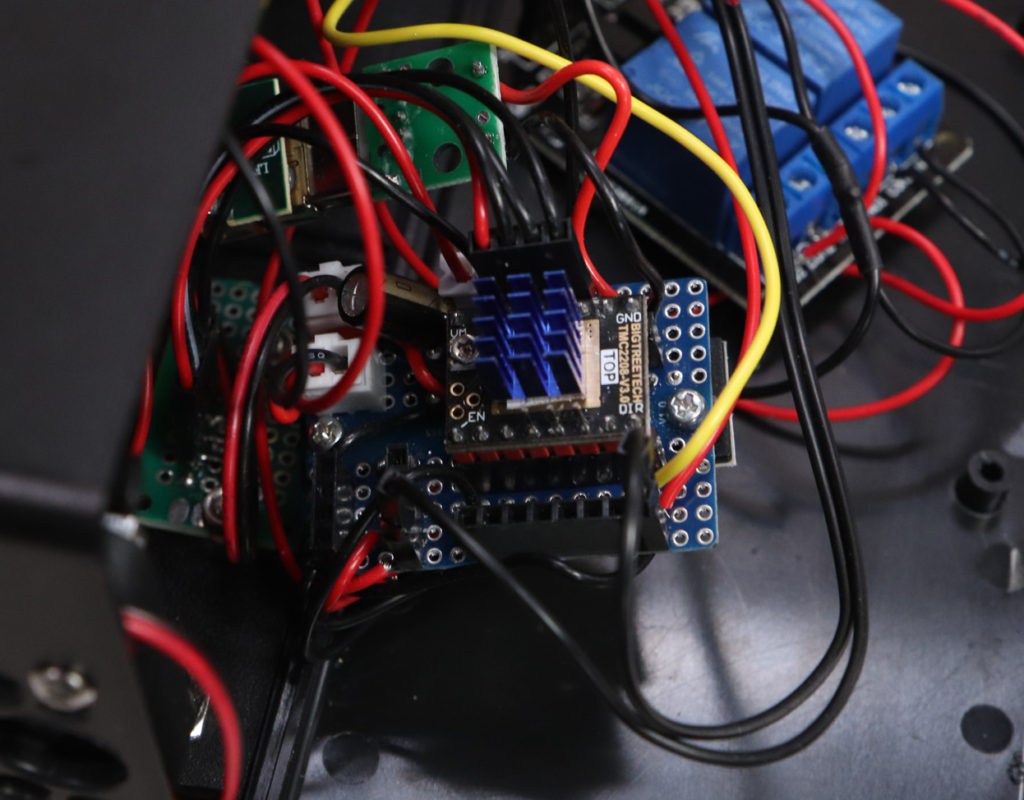
手本としたWebサイトの配線図に従い、モータードライバーTMC2208のVM端子とその横隣のGND端子に100μF 25Vのコンデンサーを配線しています。
電源の安定の為だと思うのですが、本当に必要なのかどうかは良く分かりません。



モータードライバーを制御する為の制御信号はDC5Vです。
セリアで売られているシガーソケット用のUSBアダプターの中身を取り出し、USBタイプAプラグ基板と組み合わせて、DC12VからDC5Vを取り出すステップダウンコンバーターモジュールとして使っています。
アマゾンで売られているステップダウンコンバーターモジュールは一つ当たり156円なので、セリアを捜して回るよりは安上がりかも知れません。

モータードライバーへステップ信号を送るのにはPWM信号発生器を使いました。
任意の周波数を数値を確認しながら設定できます。
DCモーターを回す際に調整するデューティーサイクルは50%で固定しています。
PWM信号発生器を操作する様子をYoutubeに投稿しています。
周波数を変更したい場合の操作性に難がります。
値段は張りますが、予め設定した3パターンの周波数にボタン一つで変更できる汎用の信号発生器も売られている様なので、そちらを使っても良さそうです。
前回の記事で紹介したDIY動画で使われているのと同じ性能のモーター、NEMA17 HS4401は横移動で使うには十分な性能でしたが、撮影機材を垂直に移動するには性能が微妙に足りませんでした。
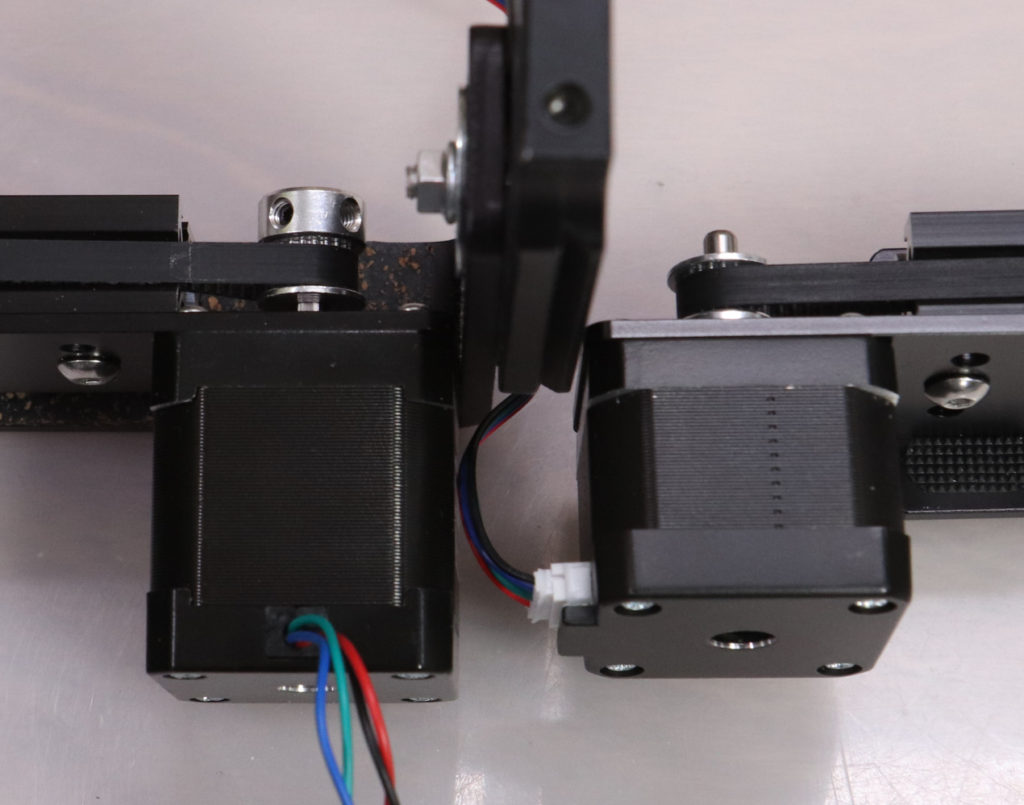
上下の垂直移動用には写真左の、アマゾンで購入できる中では一番強力そうだったNEMA17規格のモーターを使い、モータードライバーの出力も可能な限り上げました。
これにより、私の使っている一眼レフデジタルカメラとレンズの組合せを垂直移動させるのには何とか使える様になりましたが、モータードライバーの発熱は大きくなりしまた。
余裕がないので、TMC2209の様に、より高出力に対応したモータードライバーを使うか、NEMA23ステッピングモーターと対応するモータードライバー、安定化電源又はACアダプターを使った方が良いかも知れません。

加熱するTMC2208搭載モータードライバーの冷却には4cmファンを使いました。
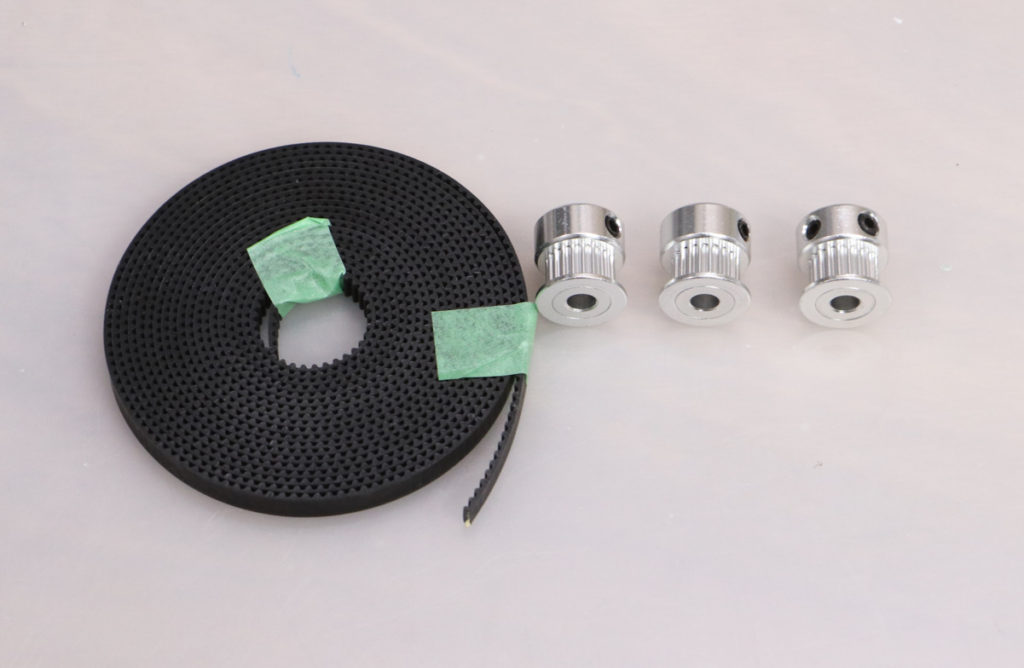
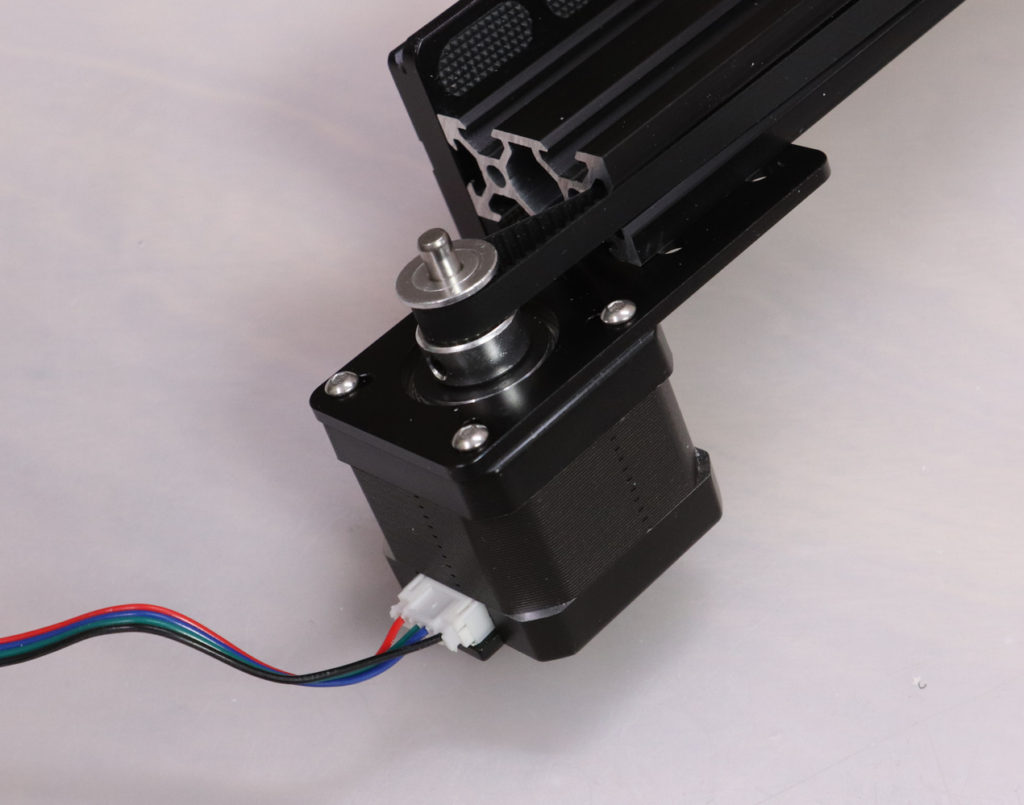
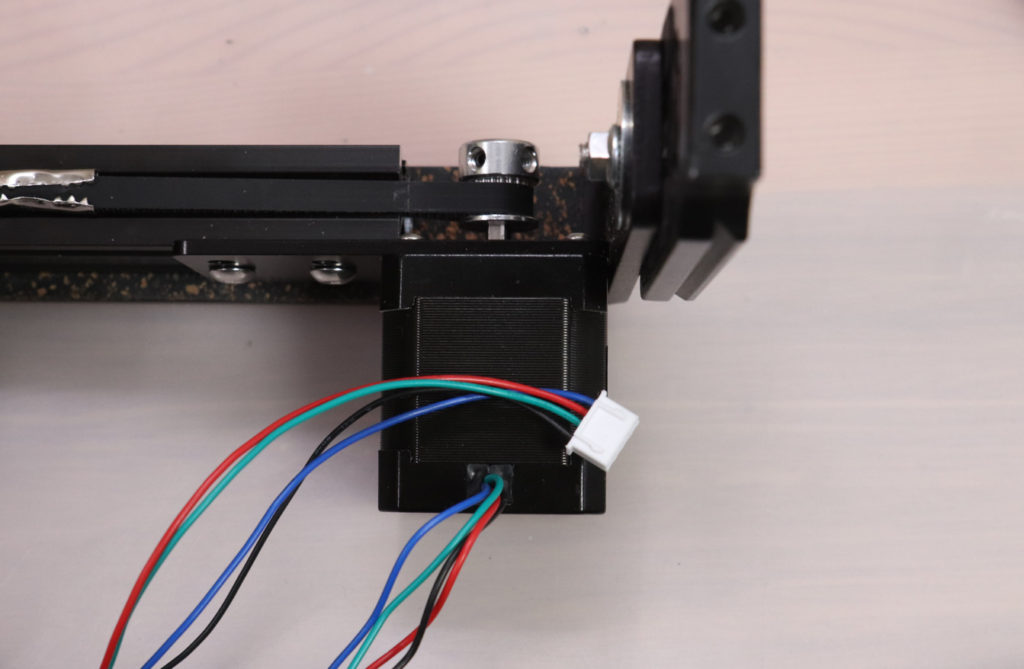
モーターの動力をガントリーロッドプレートに伝えるのには3Dプリンターで利用されているGT2規格のギヤとタイミングベルトを使っています。
モーターの軸の太さは5mmなので、対応するベルギアとセットになったタイミングベルトを購入しました。

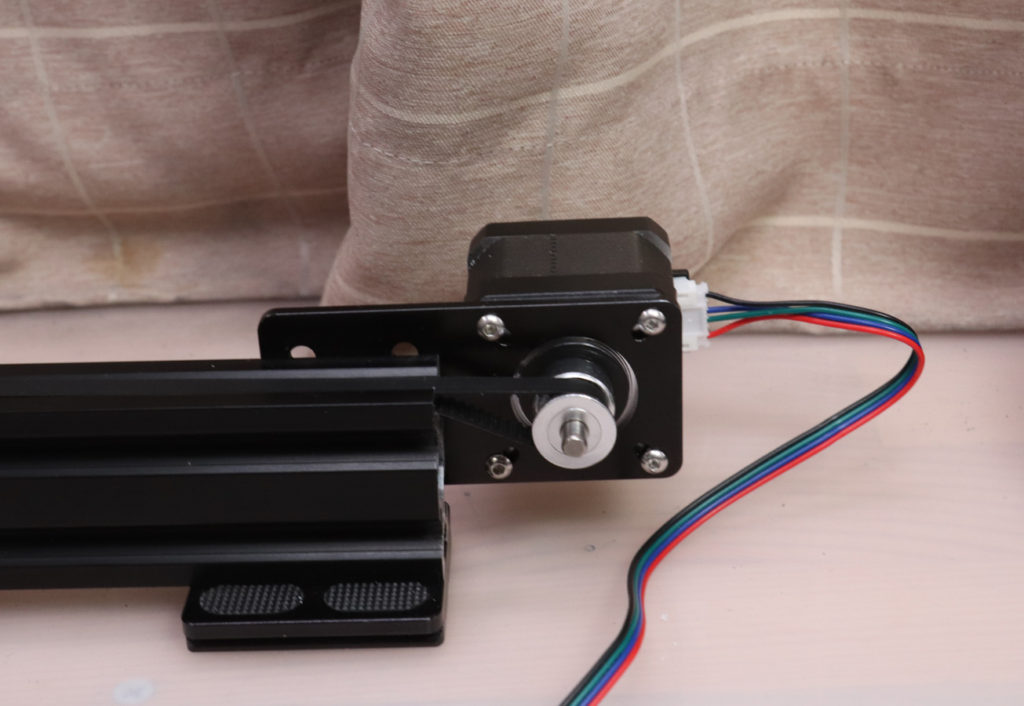


モーターを固定するプレートとモーターの反対側のテンショナーは写真の通りの物です。
モーターを固定するプレートはアルミレール用M5ナットとM5のビスを使って、テンショナーは付属しているナットとビスを使い固定しています。

タイミングベルトを固定するクリップ
制御部分の製作
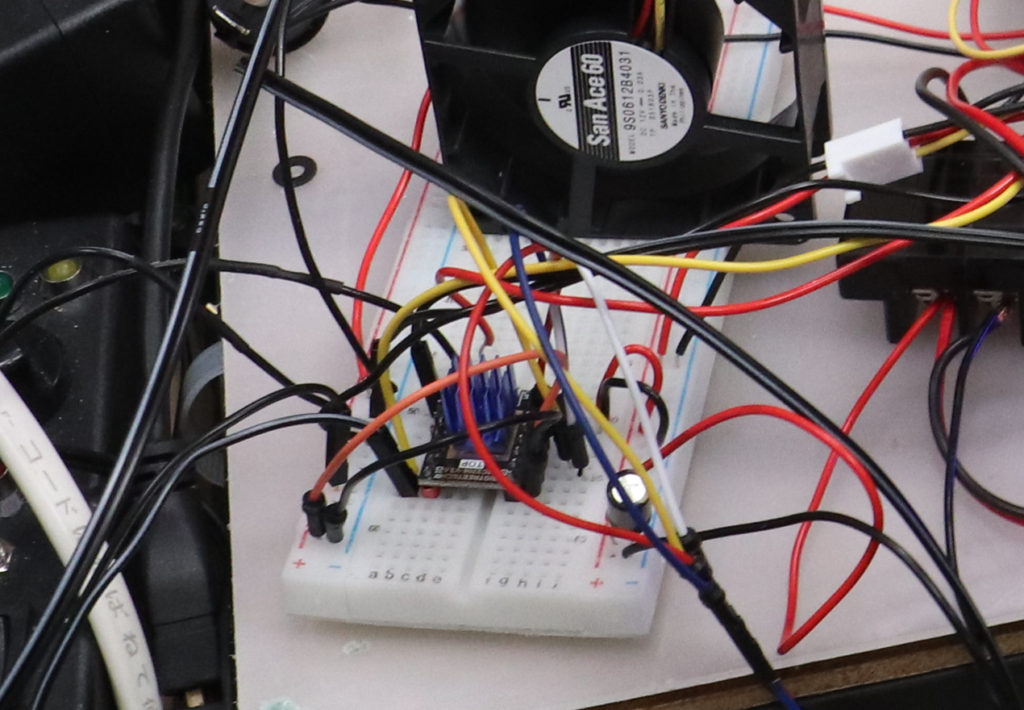
ステッピングモーターを制御する機構の試作はブレッドボードを使って行いました。
当初は前回紹介した参考にしたWebサイトの作例の様にArduino Mini Pro互換機を使ったり、リミットスイッチを使って制御したりしたいと考えていました。
試作と動作テストを繰り返した結果、モータードライバーとPWM信号発生器をスイッチで操作する、比較的単純な機構で十分実用的な物が作れる事が分かりました。
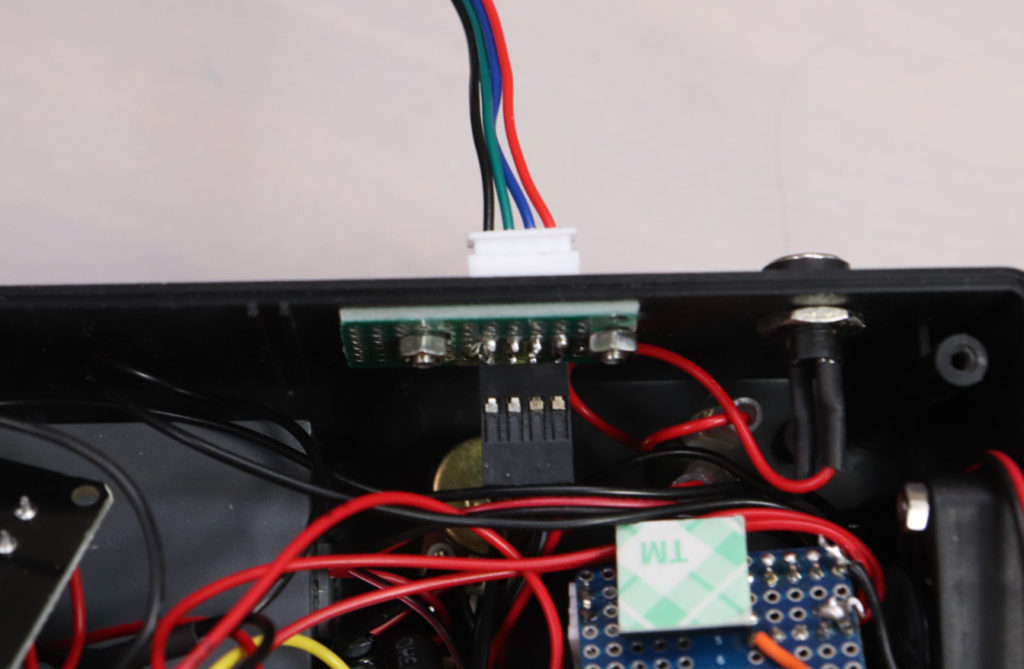
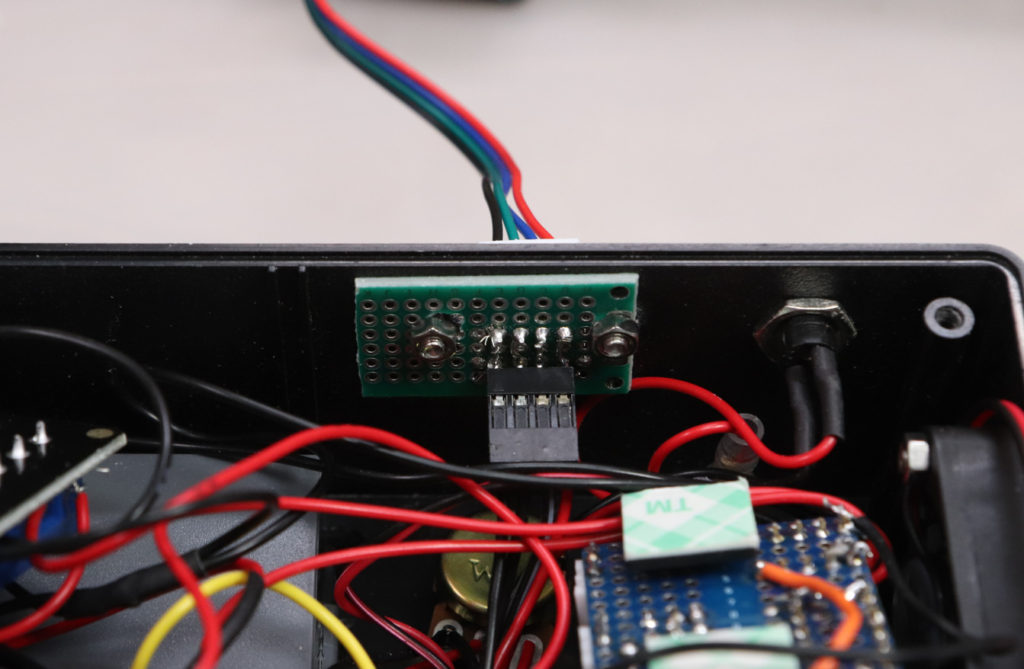
実装には小型のブレッドボードに似せたユニバーサル基板を使いました。
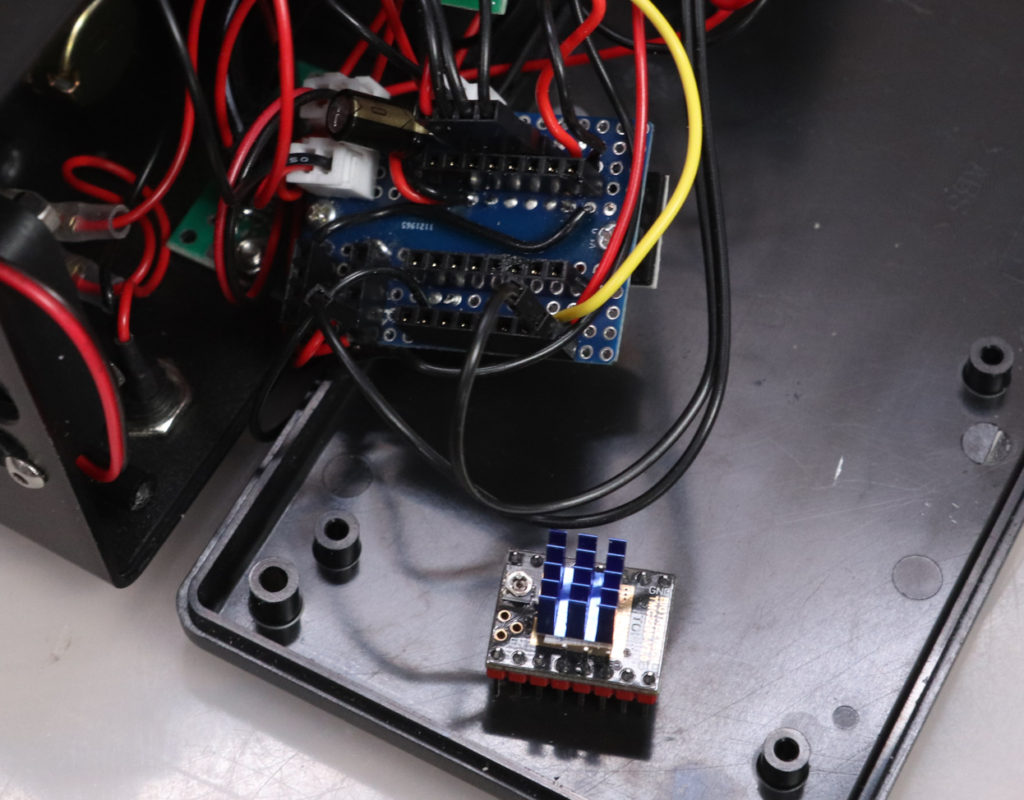

モータードライバーを容易に交換できる様に、2.54mmのピンヘッダーソケットを使い、モータードライバーを差し込み式にしました。
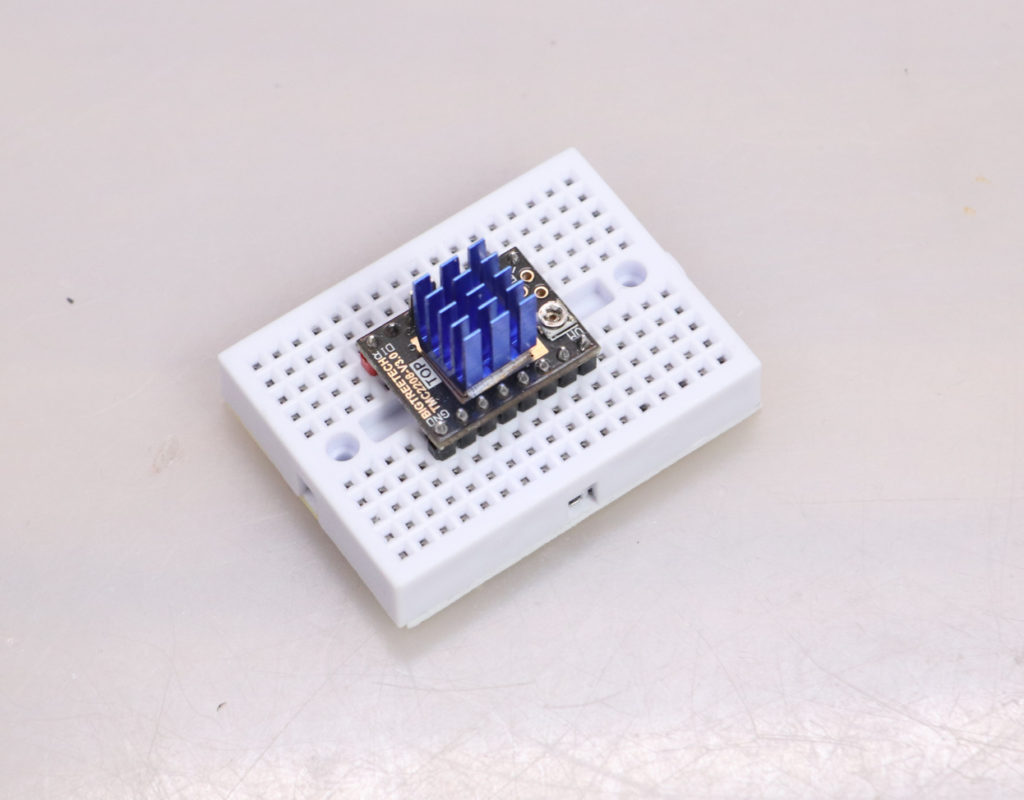
コントローラーと言う用途や整備性、一つ当たり100円しない価格を考えると、小型のブレッドボードを使った方が良いかも知れないですね。

スイッチはロッカースイッチが適当だと分かりました。
20mm穴用の3位置、20mm穴用、15mm穴用の3種類を使いました。

ロッカースイッチの配線は平型端子を使って接続しています。

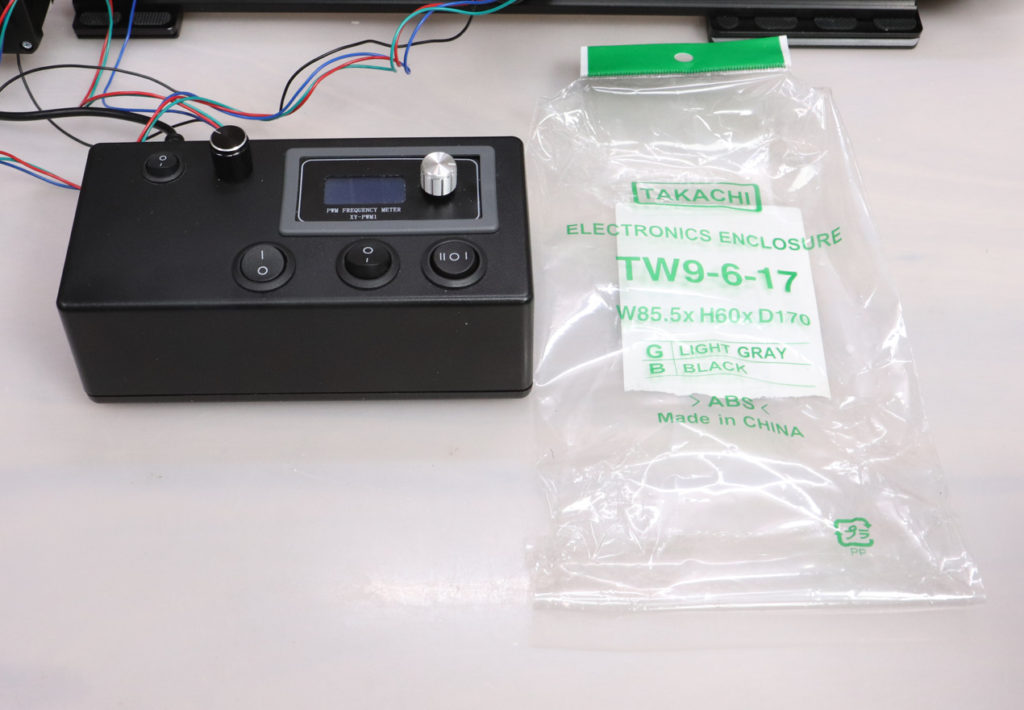
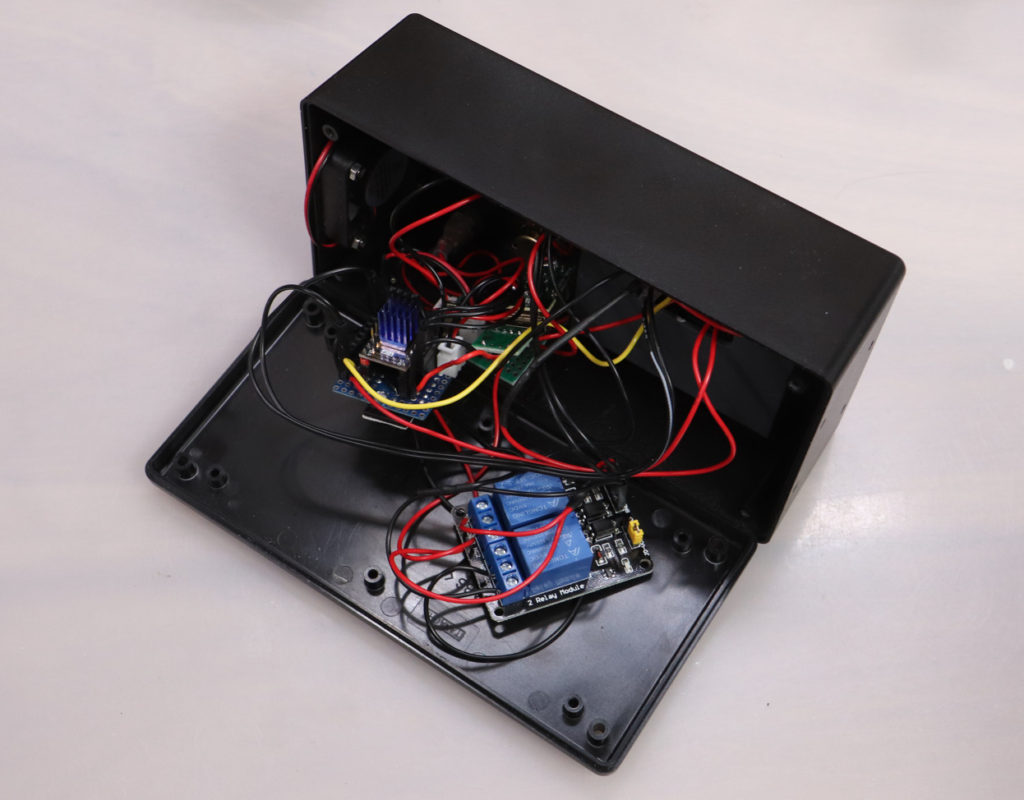
モータードライバーとスイッチ類を収めるケースはアマゾンで購入したTW型汎用プラスチックケースTW9-6-17を使いました。
一番薄い部分で2.7mmと肉厚なのでドリルや超音波カッターを使った穴開け加工はかなり大変でしたが、その分頑丈に仕上がりました。



電源の入力は外径5.5mm、内径2.1mm用のDCソケットを使いました。

ステッピングモーターとの接続はJST XHコネクターセットの中から4ピンを使いました。
モーター用のJST XHコネクターは2×8cmユニバーサル基板を切り出した物にピンヘッダーピンと共に裏表に取り付け、 ステンレスビスセット(M3、M4、M5 六角 トラス)のM3ビスとナットを使いTW型汎用プラスチックケースTW9-6-17に固定しました。

垂直移動用の電動スライダーに使っているNEMA17 59Ncm 2A ステッピングモーターの配線に取り付けられているコネクターはJST XHコネクター4ピンに交換しました。


TW型汎用プラスチックケースTW9-6-17への4cmファンの取付手順は下記の通りです。
1 ケースの外側に4cmファンをマスキングテープを使い仮止め。
2 4cmファンの四隅の丸穴を利用して3.2mmのドリルでケースに穴開け。
3 4cmファンを取り外す。
4 吸気口をドリルで適当に穴開け。
5 4cmファンをステンレスビスセット(M3、M4、M5 六角 トラス)のM3ビスとナットを使い、ケースの内側にビス固定。
4cmファンの電源コネクターはJST HXの2ピンなので、JST XHコネクターセットが活用出来ました。

ファンはそのままだとうるさい時があるので、1KΩのポテンショメーターをファンコントローラー代わりに取り付けました。
ツマミには14.5x17mmのアルミノブを使いました。
ポテンショメーターの構造上、時計回りに回すと抵抗が増え、回転が小さくなるのには違和感を覚えるので、反時計回りに回すと抵抗が増えるポテンショメーター欲しいですね。




TW型汎用プラスチックケースTW9-6-17の底にはWAKI 粘着ソフトクッション 20mm丸X高さ2mm 8個入 CN-102をゴム足代わりに貼り付けました。
4cmファンの振動も抑えられ、動作音が静かになりました。

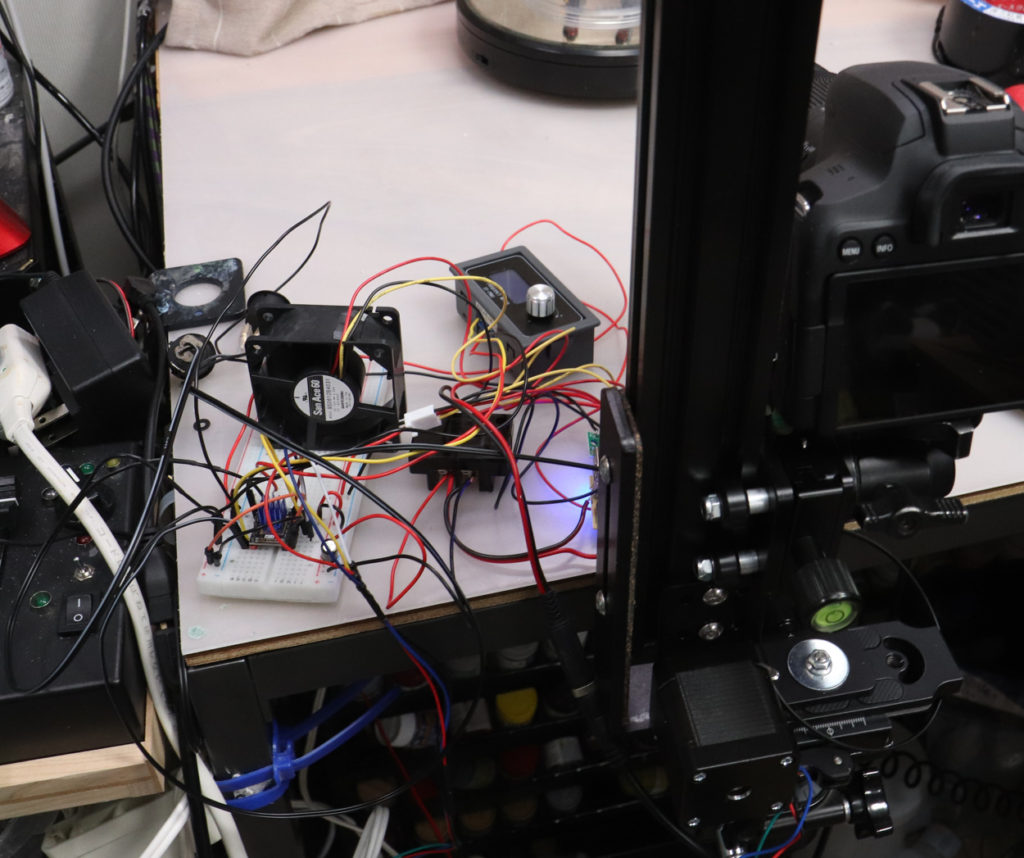
下の左のロッカースイッチはPWM信号発生器を設定する為のスイッチです。
PWM信号発生器を設定するには、PWM信号発生器に通電させつつ、スライダーが動作しない様に、モータードライバーのEnable端子への結線を切断する必要がありました。
当初は下の列の左のロッカースイッチでモータードライバーのEnabel端子への遮断のみ行い、PWM信号発生器の電源は、動作時と同じ様に右のロッカースイッチで行っていましたが、操作が複雑で、誤操作の原因になっていました。
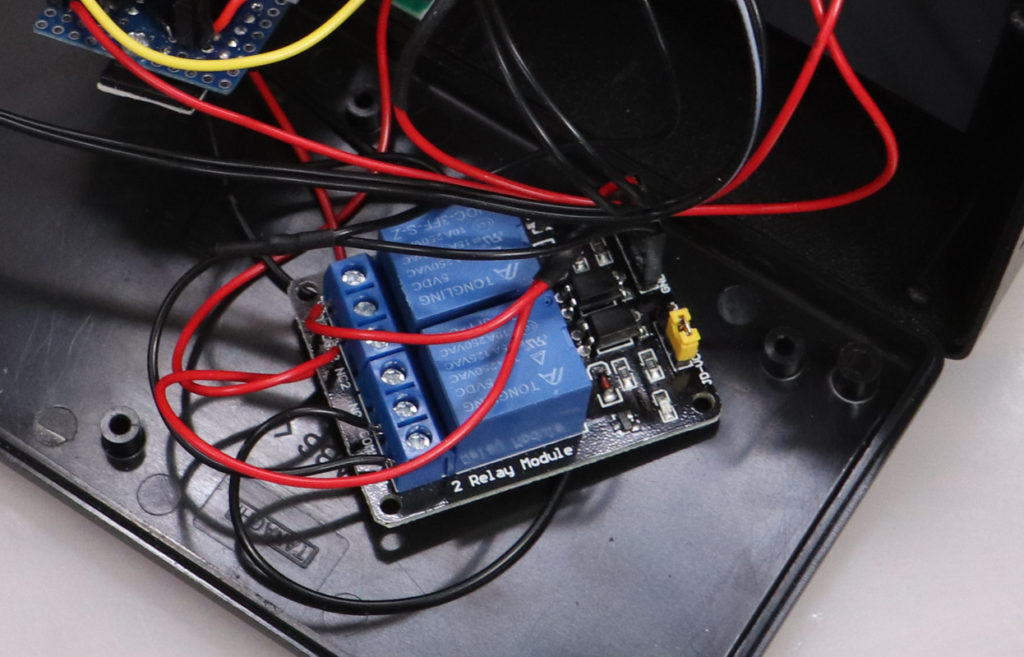
2回路のスイッチであれば、一つのスイッチでEnable端子の遮断と、PWM信号発生器の通電を同時に行う事がが可能となるのですが、20mm穴用の2回路ロッカースイッチは見つからなかったので、今回は小型の2チャンネルリレーモジュールを使い、2回路のスイッチと同様の動作を実現しました。
リレーモジュールの入力端子をGNDに結線すればリレーを動作させる事が出来るので、下の列の左のロッカースイッチでリレーの入力端子を2つともGNDに繋がる様にして、スイッチ投入時に片方の配線のスイッチを入れて、もう片方の配線のスイッチを切る、2回路のスイッチと同じ挙動を実現しました。
この記事を投稿した時点での電動スライダーの操作の様子です。
PWM信号発生器の操作性は変わらずですが、直感的に操作できる様になり、誤操作は大幅に減りました。
使った工具類

今回は六角穴のネジを多用しました。
ネジセット等に付属しているL型の六角レンチだけでもネジ締めは出来るのですが、ドライバー型の六角レンチがあれば作業がより楽に行えます。


TW型汎用プラスチックケースTW9-6-17に部品を取り付ける、穴を開ける位置を決めるにはマスキングテープを使って行いました。
丸穴は写真のステッパードリルを始めとした、各種のドリルを使って開けました。
PWM信号発生器やコネクターを取り付ける四角穴は、3.2mmのドリルで四隅を穴開けしてから糸ノコで穴を繋げて穴開けするのが一般的ですが、私は糸ノコの代りに超音波カッターを使いました。

PWM信号発生器はベゼル部の余裕があるので穴開けは比較的気楽なのですが、ケースが肉厚なので超音波カッターでの加工は大変でした。

デュポンIQ端子やJST XH端子の圧着にはIWS-2820Mを使いました。
まだ上手く使えないのでラジオペンチでの修正は必須です。
ラジオペンチはタイミングベルトクリップを留めるのにも使いましたが、幅の広いペンチやプライヤーを使う方が良いでしょう。

MrターンテーブルLを無線リモコン化する時にも使った、はんだごてやはんだ、ワイヤーストリッパーも活用しました。

収縮チューブを加熱するガンヒーター代わりに、アマゾンで買ったエンボスヒーターを使ってます。
マキタのガンヒーターを買おうかと思う度に、
「エンボスヒーターで困ってないからなあ。」
と、思い留まるのを何度も繰り返しています。
まとめ
電動スライダーを自作するのに一番大変だった事は部品の選定と購入でした。
それ程複雑な物ではないのですが、実用的な物を作るには、大小様々な部品や材料が必要となります。
中にはホームセンターや100円均一ショップで入手できる物もありますが、実店舗で購入するのが困難な物も多いので、自作にはネット通販の活用は必須ですね。
製作の実作業ではTW型汎用プラスチックケースTW9-6-17 穴開け加工が一番大変でした。
それ以外はネジ止めや差込、端子類のハンダ付けとなり、組立は比較的簡単で、全体の実作業時間は2時間も掛かっていないと思います。
自作やDIYでは、試行錯誤で使わなかった部品代や、工具類を考えると市販品よりも割高になってしまう場合もあります。
動画撮影に使っているEOS Kiss X10iやX9i、EF-S 17-55 IS F2.8 USM、EF-S 18-135 F3.5-5.8 IS USMの組合せを確実に垂直移動で使える電動スライダーが市販品で存在するかどうか分からなかったので、今回製作した電動スライダーは自作やDIYの利点が最大限に発揮できたと思います。
横移動用のスライダーを使うと、この様な動画が手軽に撮影出来ます。
垂直移動用のスライダーを使うと、この様な動画が手軽に撮影出来ます。
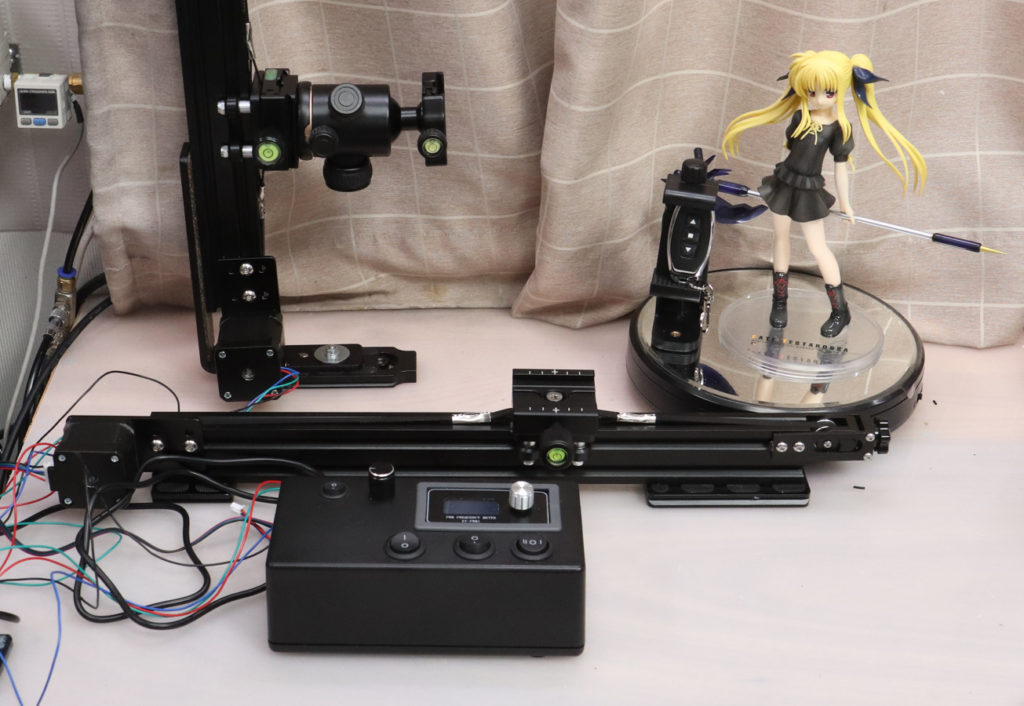
今回製作した垂直移動用の電動スライダーと、無線リモコン化したMr.ターンテーブルLを併用して撮影して、Fimola Xで編集する事で、この様な動画を撮影する事が出来ます。
今後は、参考にしたYoutubeの動画やWebサイトで製作されている物と同じ様に、70cmのレールを使い、横移動用と首振り用のモーターをArduino Pro Miniで制御する物も作ってみたいと考えています。
今回の記事はこれで終わりです。






- Nimbus
- EOS R50 VとRF-S14-30mm F4-6.3 IS STM PZを買った。 2026年1月2日
- となりのモケイフェスティバル8 Web即売会に参加します 2025年11月30日
- ColosoのミロさんとタカトリさんのZBrush向け講座を受講した 2025年9月20日
- M5Stack Tab5で押しボタンカウンターを作った 2025年9月19日
- 液晶ペンタブレット Huion Kamvas24 Plus 2025年8月13日
3件のピンバック
撮影用 電動スライダーを自作した | Nimbusのデジタルブログ
自作電動スライダーのモータードライバーをTMC2209搭載品にした | Nimbusのデジタルブログ
自作 電動 カメラ用スライダーの動画を投稿した | Nimbusのデジタルブログ